微型电机是电子电动产品的核心驱动部件,有运动的部分都是需要电机,有的产品中会用到非常多的微型电机来驱动,比如说智能机器人,像轮子的运动、双臂的运动、头部、手指、关节等运动部分都是需要微型电机来驱动,对于智能机器人研发厂家来讲,微型电机的选型与控制则是极为重要的部分。那么如何选择智能机器人微型电机呢?下面天孚微电机来为大家讲一讲。
最常遇到的问题是,市场上的微型电机可选择性太多,一些智能机器人厂商根本不知道需要选择什么样的微型电机,我们下面从简单的角度上看微型电机的分类。
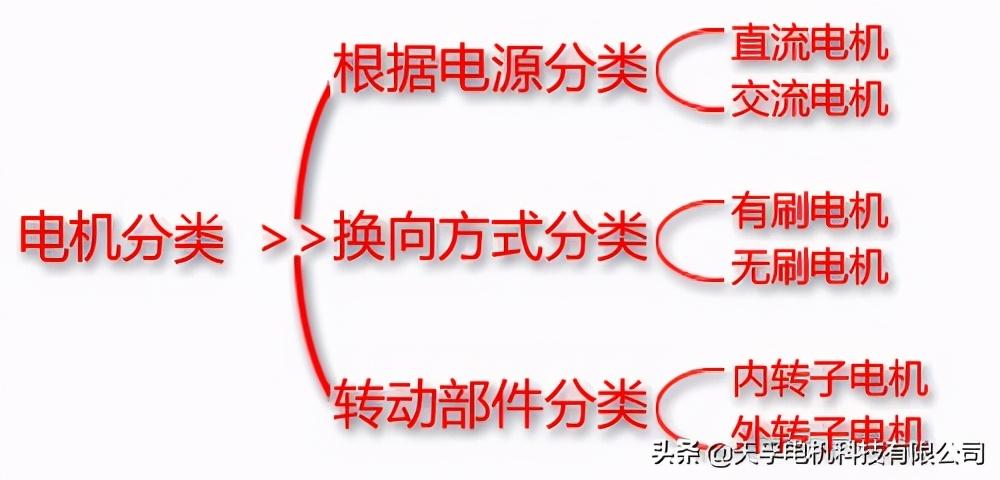
首先不管微型电机的种类,从结构上来讲,微型电机都会有转子、换向器、定子、外壳这几个部分,从微型电机的基本原理来说,微型电机的就是磁铁和线圈组成的转动装置,所以在微型电机的区别上无非是磁场产生的不同、线圈电流的换向方式、转动结构的设计不同这几种。下面我们详细分析下不同种类的微型电机。
首先是直流电机与交流电机,这两种电机非常容易理解,一个是使用直流电驱动、一个是使用交流电驱动,它们的转动原理都是通过通电线圈在磁场中受力运动。微型直流电机是直接利用通电线圈在磁场中受力旋转;交流电机则先在线圈切割磁力线产生电流,有电流的闭环线圈在磁场中受力运动。相对来讲微型直流电机更容易控制,需要调速的场合非常适用。
然后是有刷电机与无刷电机,两者的区别是一个采用机械换向(通过碳刷与换向器摩擦),一个采用电子换向(通过霍尔传感器确定位置),这是有刷直流电机与无刷电机的区别,在调速性能上来讲,有刷直流电机控制方便,无刷控制复杂,成本也更高,但是无刷的使用寿命较长、噪音相对来讲也比较低。

最后是内转子电机与外转子电机,这两种微电机也非常容易理解,转子和微电机主轴旋转,微电机主体固定的就是内转子电机;转子和微电机外壳旋转,微电机主轴固定的则是外转子电机。
对于智能机器人来讲,使用最多的就是有刷直流电机、无刷电机、步进电机与舵机,在机器人电机选择方面主要涉及到工作电压、转速、扭矩、电流、减速比(减速电机)几个参数,由于微型电机的转速是非常快的一般5000转以上,对于机器人来说有的是不需要那么高的转速的,并且需要大扭力输出,所以就会用到微型减速电机来进行低转速、大扭力输出。

选择智能机器人微电机确定参数需要考虑其运行环境,比如行动路面因素(爬坡或跨越)与摩擦系数、最大的运行速度、加速度、智能机器人的重量与轮胎大小。微电机的转速与机器人的速度相关,根据轮胎的直径来选择合适的转速,可根据公式2×R(轮胎半径)×w(转速)÷60来计算机器人的运行速度。常见智能机器人都是采用12V或24V的电压驱动,所以微电机驱动电压选择在此范围来选择即可。
微型直流有刷电机成本低,运行平稳、调速方便,机器人轮毂电机大多选用有刷直流电机,也有一些厂家选择无刷电机,至于舵机就用在机器人上和角度有关的运动中,如手臂、头部转动等。
以上就是智能机器人微电机的选择方法,更多有关微型直流电机资讯,请继续关注天孚微电机